
Cerebellar Control and Adaptation
Researchers: Rolf Johansson (area leader), Anders Rantzer, Pål Johan From, Jonas Dürango
Start date: 2011-01
End-date: 2013-01
----
Objective:
Description:
Reconstruction of movement control properties of the brain could result in many potential advantages for application in many areas of systems and control—e.g., motion control, robotics, network design, sensor fusion. However, a hampering factor so far has been the lack of knowledge of the structure and function of brain circuitry in vivo during movement control. Much more detailed information has recently become available for the area of the cerebellum that controls arm-hand movements. In addition to previously obtained extensive background knowledge of the overall connectivity of the controlling neuronal network, recent studies have provided detailed characterizations of local microcircuitry connectivity and physiology in vivo. In the present study, we study one component of this neuronal network, the cuneate nucleus, and characterize its mathematical properties using system identification theory. The cuneate nucleus is involved in the processing of the sensory feedback evoked by movements. As a substrate for our work, we use a characterization of incoming and outgoing signals of individual neurons during sensory activation as well as a recently obtained microcircuitry characterization for this structure. Future work will show whether specific aspects of the mathematical properties can be ascribed to a specific microcircuitry and/or neuronal property.
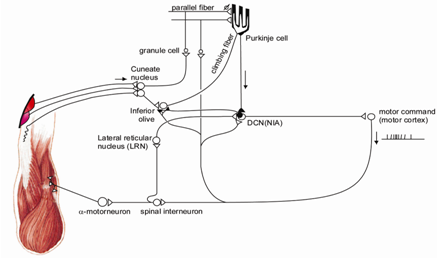
The cerebellar system for the voluntary control of arm-hand movements involves a large number of different neuron types. These neurons are located both inside the cerebellum but also in extracerebellar brain structures, which provide processed motor and sensory information to the cerebellum. The various different neuron types have different morphology, receive different types, number and patterns of synaptic inputs and have different firing rates and kinetics. Further research issues involve:
- A circuit theory for cerebellar networks
- Analysis of cerebellar adaptation
- Cerebellar biomimetic control of robotic motion
Synergies
This project has synergies with research on robotics, motion control, networks and distributed control.
References
- M. Ito, Control of mental activities by internal models in the cerebellum. Nat Rev Neurosci, 2008, 9:304-313.
- H. Jörntell, J. Dürango, R. Johansson. Stochastic Neural Firing Properties in Neurons of a Cerebellar Control System. Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2010), The University of Tokyo, Tokyo, Japan, September 26-29, 2010, pp. 771-776
- H. Jörntell, P.-O. Forsberg, F. Bengtsson, R. Johansson. Mathematical Modeling of Brain Circuitry during Cerebellar Movement Control, Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO2009), December 19 -23, 2009, Guilin, China, pp. 98-103.
2013-09-16